The impressive scalability of the Internet infrastructure is in large part due to a design philosophy that advocates a simple architecture for the core of the network, with most of the intelligence and state management implemented in the end systems [11]. The service model provided by the network substrate is therefore primarily a ``best-effort'' one, which implies that packets may be lost, reordered or duplicated, and end-to-end delays may be variable. Congestion and accompanying packet loss are common in heterogeneous networks like the Internet because of overload, when demand for router resources, such as bandwidth and buffer space, exceeds what is available. Thus, end systems in the Internet should incorporate mechanisms for detecting and reacting to network congestion, probing for spare capacity when the network is uncongested, as well as managing their available bandwidth effectively.
Previous work has demonstrated that the result of uncontrolled congestion is a phenomenon commonly called ``congestion collapse'' [9,14]. Congestion collapse is largely alleviated today because the popular end-to-end Transmission Control Protocol (TCP) [31,41]incorporates sound congestion avoidance and control algorithms. However, while TCP does implement congestion control [19], many applications including the Web [7,13]use several logically different streams in parallel, resulting in multiple concurrent TCP connections between the same pair of hosts. As several researchers have shown [3,4,28,29,43], these concurrent connections compete with - rather than learn from - each other about network conditions to the same receiver, and end up being unfair to other applications that use fewer connections. The ability to share congestion information between concurrent flows is therefore a useful feature, one that promotes cooperation among different flows rather than adverse competition.
In today's Internet is the increasing number of applications that do not use TCP as their underlying transport, because of the constraining reliability and ordering semantics imposed by its in-order byte-stream abstraction. Streaming audio and video [26,35,42]and customized image transport protocols are significant examples. Such applications use custom protocols that run over the User Datagram Protocol (UDP) [30], often without implementing any form of congestion control. The unchecked proliferation of such applications would have a significant adverse effect on the stability of the network [4,9,14].
Many Internet applications deliver documents and images or stream audio and video to end users and are interactive in nature. A simple but useful figure-of-merit for interactive content delivery is the end-to-end download latency; users typically wait no more than a few seconds before aborting a transfer if they do not observe progress. Therefore, it would be beneficial for content providers to adapt what they disseminate to the state of the network, so as not to exceed a threshold latency. Fortunately, such content adaptation is possible for most applications. Streaming audio and video applications typically encode information in a range of formats corresponding to different encoding (transmission) rates and degrees of loss resiliency. Image encoding formats accommodate a range of qualities to suit a variety of client requirements.
Today, the implementor of an Internet content dissemination application has a challenging task: for her application to be safe for widespread Internet deployment, she must either use TCP and suffer the consequences of its fully-reliable, byte-stream abstraction, or use an application-specific protocol over UDP. With the latter option, she must re-implement congestion control mechanisms, thereby risking errors not just in the implementation of her protocol, but also in the implementation of the congestion controller. Furthermore, neither alternative allows for sharing congestion information across flows. Finally, the common application programming interface (API) classes for network applications-Berkeley sockets, streams, and Winsock [32]-do not expose any information about the state of the network to applications in a standard way2. This makes it difficult for applications running on existing end host operating systems to make an informed decision, taking network variables into account, during content adaptation.
Our previous work provided the rationale, initial design, and simulation of the Congestion Manager, an end-system architecture for sharing congestion information between multiple concurrent flows [4]. In this paper, we describe the implementation and evaluation of the CM in the Linux operating system. We focus on a version of the CM where the only changes made to the current IP stack are at the data sender, with feedback about congestion or successful data receptions being provided by the receiver CM applications to their sending peers, which communicate this information to the CM via an API. We present a summary of the API used by applications to adapt their transmissions to changing network conditions, and focus on those elements of the API that changed in the transition from the simulation to the implementation.
We evaluate the Congestion Manager by posing and answering several key questions:
Is its callback interface, used to inform applications of network state and other events, effective for a diverse set of applications to adapt without placing a significant burden on developers?
Because most robust congestion control algorithms rely on receiver feedback, it is natural to expect that a CM receiver is needed to inform the CM sender of successful transmissions and packet losses. However, to facilitate deployment, we have designed our system to take advantage of the fact that several protocols including TCP and other applications already incorporate some form of application-specific feedback, providing the CM with the loss and timing information it needs to function effectively.
Using the CM API, we implement several case studies both in and out of the kernel, showing the applicability of the API to many different application architectures. Our implementation of a layered streaming audio/video application demonstrates that the CM architecture can be used to implement highly adaptive congestion controlled applications. Adaptation via the CM helps these applications achieve better performance and also be fair to other flows on the Internet.
We have also modified a legacy application-the Internet audio tool vat from the MASH toolkit [24]-to use the CM to perform adaptive real-time delivery. Since less than one hundred lines of source code modification was required to CM-enable this complex application and make it adapt to network conditions, we believe it demonstrates the ease with which the CM makes applications adaptive.
Is the congestion control correct?
As a trusted kernel module, the CM frees both transport protocols and applications from the burden of implementing congestion management. We show that the CM behaves in the same network-friendly manner as TCP for single flows. Furthermore, by integrating flow information between both kernel protocols and user applications, we ensure that an ensemble of concurrent flows is not an overly aggressive user of the network.
In today's off-the-shelf operating systems, does the CM place any performance limitations upon applications?
We find that our implementation of TCP (which uses the CM for its congestion control) has essentially the same performance as standard TCP, with the added benefits of integrated congestion management across flows, with only small (0-3%) CPU overhead.
In a CM system where no changes are made to the receiver protocol stack, UDP-based applications must implement a congestion feedback mechanism, resulting in more overhead compared to the TCP applications. However, we show that these applications remain viable, and that the architectural change and API calls reduce worst-case throughput by 0 - 25%, even for applications that desire fine-grained information about the network on a per-packet basis.
To our knowledge, this is the first implementation of a general application-independent system that combines integrated flow management with a convenient API to enable content adaptation. The end-result is that applications achieve the desirable congestion control properties of long-running TCP connections, together with the flexibility to adapt data transmissions to prevailing network conditions.
The rest of this paper is organized as follows. Section 2 describes our system architecture and implementation. Section 3 describes how network-adaptive applications can be engineered using the CM, while Section 4 presents the results of several experiments. In Section 5, we discuss some miscellaneous details and open issues in the CM architecture. We survey related work in Section 6 and conclude with a summary in Section 7.
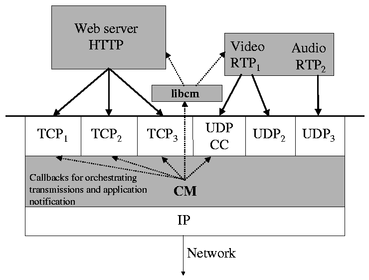
The CM performs two important functions. First, it enables efficient multiplexing and congestion control by integrating congestion management across multiple flows. Second, it enables efficient application adaptation to congestion by exposing its knowledge of network conditions to applications. Most of the CM functionality in our Linux implementation is in-kernel; this choice makes it convenient to integrate congestion management across both TCP flows and other user-level protocols, since TCP is implemented in the kernel.
To perform efficient aggregation of congestion information across concurrent flows, the CM has to identify which flows potentially share a common bottleneck link en route to various receivers. In general, this is a difficult problem, since it requires an understanding of the paths taken by different flows. However, in today's Internet, all flows destined to the same end host take the same path in the common case, and we use this group of flows as the default granularity of flow aggregation3. We call this group a macroflow: a group of flows that share the same congestion state, control algorithms, and state information in the CM. Each flow has a sending application that is responsible for its transmissions; we call this a CM client. CM clients are in-kernel protocols like TCP or user-space applications.
The CM incorporates a congestion controller that performs congestion avoidance and control on a per-macroflow basis. It uses a window-based algorithm that mimics TCP's additive-increase/multiplicative decrease (AIMD) scheme to ensure fairness to other TCP flows on the Internet. However, the modularity provided by the CM encourages experimentation with other non-AIMD schemes that may be better suited to specific data types such as audio or video.
While the congestion controller determines what the current window (rate) ought to be for each macroflow, a scheduler decides how this is apportioned among the constituent flows. Currently, our implementation uses a standard unweighted round-robin scheduler.
In-kernel CM clients such as a TCP sender use CM function calls to transmit data and learn about network conditions and events. In contrast, user-space clients interact with the CM using a portable, platform-independent API described in Section 2.1. A platform-dependent CM library, libcm, is responsible for interfacing between the kernel and these clients, and is described in Section 2.2. These components are shown in Figure 1.
When a client opens a CM-enabled socket, the CM allocates a flow to it and assigns the flow to the appropriate macroflow based on its destination. The client initiates data transmission by requesting permission to send data. At some point in the future depending on the available rate, the CM issues a callback permitting the client to send data. The client then transmits data, and tells the CM it has done so. When the client receives feedback from the receiver about its past transmissions, it notifies the CM about these and continues.
When a client makes a request to send on a flow, the scheduler checks whether the corresponding macroflow's window is open. If so, the request is granted and the client notified, upon which it may send some data. Whenever any data is transmitted, the sender's IP layer notifies the CM, allowing it to ``charge'' the transmission to the appropriate macroflow. When the client receives feedback from its remote counterpart, it informs the CM of the loss rate, number of bytes transmitted correctly, and the observed round trip time. On a successful transmission, the CM opens up the window according to its congestion management algorithm and grants the next, if any, pending request on a flow associated with this macroflow. The scheduler also has a timer-driven component to perform background tasks and error handling.
The CM API is specified as a set of functions and callbacks that a client uses to interface with the CM. It specifies functions for managing state, for performing data transmissions, for applications to inform the CM of losses, for querying the CM about network state, and for constructing and splitting macroflows if the default per-destination aggregation is unsuitable for an application. The CM API is discussed in detail in [4], which presents the design rationale for the Congestion Manager. Here we provide an overview of the API and a discussion of those features which changed during the transition from simulation to implementation.
To perform accurate bookkeeping of the congestion window and outstanding bytes for a macroflow, the CM needs to know of each successful transmission from the host. Rather than encumber clients with reporting this information, we modify the IP output routine to call cm_notify(cm_flowid, nsent) on each transmission. (The IP layer obtains the cm_flowid using a well-defined CM interface that takes the flow parameters (addresses, ports, protocol field) as arguments.) However, if a client decides not to transmit any data upon a cmapp_send() callback invocation, it is expected to call cm_notify(dst, 0) to allow the CM to permit some other flows on the macroflow to transmit data.
If a client wishes to learn about its (per-flow) available bandwidth and round-trip time, it can use the cm_query() call, which returns these quantities. This is especially useful at the beginning of a stream when clients can make an informed decision about the data encoding to transmit (e.g., a large color or smaller grey-scale image).
The CM library provides users with the convenience of a callback-based API while separating them from the details of how the kernel to user callbacks are implemented. While direct function callbacks are convenient and efficient in the same address space, as is the case when the kernel TCP is a client of the CM, callbacks from the kernel to user code in conventional operating systems are more difficult. A key decision in the implementation of libcm was choosing a kernel/user interface that maximizes portability, and minimizes both performance overhead and the difficulty of integration with existing applications. The resulting internal interface between libcm and the kernel is:
Note that client programs of the CM do not see this interface; they see only the standard cm_* functions provided by libcm. The use of sockets or signals does change the way the application's event handling loop interacts with libcm; after passing the socket into libcm, the library performs the appropriate ioctls and then calls back into the application.
We considered a number of mechanisms with which to implement libcm. In this section, we discuss our reasons for choosing the control-socket+select+ioctl approach.
While much research has focused on reducing the cost of crossing the user/kernel boundary (extensible kernels in SPIN [8], fast, generic IPC in Mach [6], etc.) many conventional operating systems remain limited to more primitive methods for kernel-to-user notification, each with their own advantages and disadvantages. While functionality like the Mach port set-based IPC would be ideal for our purposes, pragmatically we considered four common mechanisms for kernel to user communication: Signals, system calls, semaphores, and sockets. A discussion of the merits of each follows.
Signals have several immediate drawbacks. First, if the CM were to appropriate an existing signal for its own use, it might conflict with an application using the same signal. Avoiding this conflict would require the standardization of a new signal type, a process both slow and of questionable value, given the existence of better alternatives. Second, the cost to an application to receive a signal is relatively high, and some legacy applications may not be signal-safe. While the new POSIX 1003.1b [18]soft realtime signals allow delivering a 32-bit quantity with a signal, applications would need to follow up a signal with a system call to obtain all of the information the kernel wished to deliver, since multiple flows may become ready at once. For these reasons, we consider mandating the use of signals the wrong course for implementing the kernel to user callbacks. However, we provide an option for processes to receive a SIGIO when their control socket status changes, akin to POSIX asynchronous I/O.
System calls that block do not integrate well with applications that already have their own event loop, since without polling, applications cannot wait on the results of multiple system calls. A system call is able to return immediately with the data the user needs, but the impediments it poses to application integration are large. System calls would work well in a threaded environment, but this presupposes threading support, and the select-based mechanism we describe below can be used in a threaded system without major additional overhead.
Semaphores suffer from the immediate drawback that they are not commonly used in network applications. For an application that uses semop on an array of semaphores as its event loop, a CM semaphore might be the best implementation avenue, for many of the same reasons that we chose sockets for network-adaptive applications. However, most network applications use socket sets instead of semaphore sets, and sockets have a few other benefits, which we discuss next.
Sockets provide a well-defined and flexible interface for applications in the form of the select() system call, though they have a downside similar to that of signals: an application wishing to receive a notification via a socket in a non-blocking manner must select() on the socket, and then perform a system call to obtain data from the socket. However, a select-based interface meshes well with many network applications that already have a select-loop based architecture. Utilizing a control socket also helps restrict the code changes caused by the CM to the networking stack.
Finally, we decided to use a single control socket instead of one control socket per flow to avoid unnecessary overhead in applications with large numbers of open socket descriptors, such as select()-based webservers and caches. Because some aspects of select scale linearly with the number of descriptors, and many operating systems have limits on the number of open descriptors, we deemed doubling the socket load for high-performance network applications a bad idea.
Select provides notification that ``some event'' has occured. In theory, 7 different events could be sent by abusing the read, write, and exception bits, but applications need to extract more information than this. The CM provides two types of callbacks. Generally speaking, the first is a ``permission to send'' callback for a particular flow. To maintain even distribution of bandwidth between flows, a loose ordering should be preserved with these messages, but exact ordering is unimportant provided no flows are ignored until the application receives further updates (thereby starving the flows). If multiple permission notifications occur, the application should receive all of them so it can send data on all available flows. The second callback is a ``status changed'' notification. If multiple status changes occur before the application obtains this data from the kernel, then only the current status matters.
The weak ordering and lack of history prompted us to choose an ioctl-based query instead of a read or message queue interface, minimizing the state that must be maintained in the kernel. Status updates simply return the current CM-maintained network state estimate, and ``who can send'' queries perform a select-like operation on the flows maintained by the kernel, requiring no extra state, instead of a potentially expensive per-process message queue or data stream. Returning all available flows has an added benefit of reducing the number of system calls that must be made if several flows become ready simultaneously.
In this section, we describe several different classes of applications, and describe the ways those applications can make use of the CM. We explore two in-kernel clients, and several user-space data server programs, and examine the task of integrating each with the CM.
Typical network applications fall into one of several categories:
The CM library provides several options for adaptive applications that wish to make use of its services:
Connection creation. When TCP creates a new connection via either accept (inbound) or connect (outbound), it calls cm_open() to associate the TCP connection with a CM flow. Thereafter, the pacing of outgoing data on this connection is controlled by the CM. When application data becomes available, after performing all the non-congestion-related checks (e.g., the Nagle algorithm [41], etc.) data is queued and cm_request() is called for the flow. When the CM scheduler schedules the flow for transmission, the cmapp_send() routine for TCP is called. The cmapp_send() for TCP transmits any retransmission from the retransmission queue. Otherwise, it transmits the data present in the transmit socket buffer by sending up to one maximum segment size of data per call. Finally, the IP output routine calls cm_notify() when the data is actually sent out.
TCP input. The TCP input routines now feedback to the CM. Round trip time (RTT) sample collection is done as usual using either RFC 1323 timestamps [20]or Karn's algorithm [22] and is passed to CM via cm_update(). The smoothed estimates of the RTT ( srtt) and round-trip time deviation are calculated by the CM, which can now obtain a better average by combining samples from different connections to the same receiver. This is available to each TCP connection via cm_query(), and is useful in loss recovery.
Data acknowledgements. On arrival of an ACK for new data, the TCP sender calls cm_update() to inform the CM of a successful transmission. Duplicate acknowledgements cause TCP to check its dupack count (dup_acks). If dup_acks < 3, then TCP does nothing. If dup_acks = = 3, then TCP assumes a simple, congestion-caused packet loss, and calls cm_update to inform the CM. TCP also enqueues a retransmission of the lost segment and calls cm_request(). If dup_acks > 3, TCP assumes that a segment reached the receiver and caused this ACK to be sent. It therefore calls cm_update(). Unlike duplicate ACKs, the expiration of the TCP retransmission timer notifies the sender of a more serious batch of losses, so it calls cm_update with the CM_LOST_FEEDBACK option set to signify the occurrence of persistent congestion to the CM. TCP also enqueues a retransmission of the lost segment and calls cm_request().
TCP/CM Implementation. The integration of TCP and the CM required less than 100 lines of changes to the existing TCP code, demonstrating both the flexibility of the CM API and the low programmer overhead of implementing a complex protocol with the Congestion Manager.
The CM also provides congestion-controlled UDP sockets. They provide the same functionality as standard Berkeley UDP sockets, but instead of immediately sending the data from the kernel packet queue to lower layers for transmission, the buffered socket implementation schedules its packet output via CM callbacks. When a CM UDP socket is created, it is bound to a particular flow. When data enters the packet queue, the kernel calls cm_request() on the flow associated with the socket. When the CM schedules this flow for transmission, it calls udp_ccappsend() in the CM UDP module. This function transmits one MTU from the packet queue, and requests another callback if packets remain. The in-kernel implementation of the CM UDP API adds no data copies or queue structures, and supports all standard UDP options. Modifying existing applications to use this API requires only providing feedback to the CM, and setting a socket option on the socket.
A typical client of the CM UDP sockets will behave as follows, after its usual network socket initialization:
flow = cm_open(dst, port)
setsockopt(flow, ..., CM_BUF)
loop:
<send data on flow>
<receive data acknowledgements>
cm_update(flow, sent, received, ...)
Streaming layered audio or video applications that have a number of discrete rates at which they can transmit data are well-served by the CM rate callbacks. Instead of requiring a comparatively expensive notification for each transmission, these applications are instead notified only in the rare event that their network conditions change significantly. Layered applications open their usual UDP socket, and call cm_open() to obtain a control socket. They operate in their own clocked event loop while listening for status changes on either their control socket or via a SIGIO signal. They use cm_thresh() to inform the CM about network changes for which they should receive callbacks.
Applications that desire last-minute control over their data transmission (i.e. those that do not want any buffering inside the kernel) use the request callback API provided by the CM. When given permission to transmit via the cmapp_send() callback from the CM, they may use cm_query() to discover the current network conditions and adapt their content based on that. Other servers may simply wish to send the most up-to-date content possible, and so will defer their data collection until they know they can send it. The rough sequence of CM calls that are made to achieve this in the application are:
flow = cm_open(dst) cm_request(flow) <receive cmapp_send() callback from libcm> cm_query(flow, ...) <send data> <receive data acks> cm_update(flow, sent, lost, ...)
Other options exist for applications that wish to exploit the unique nature of their network utilization to reduce the overhead of using the services of the Congestion Manager. We discuss one such option below in the manner in which we adapted the vat interactive audio application to use the CM.
The vat application provides a constant bit-rate source of interactive audio. Its inability to downsample its audio reduces the avenues it has available for bandwidth adaptation. Therefore, the best way to make vat behave in a network-friendly and backwards compatible manner is to preemptively drop packets to match the available network bandwidth. There are, of course, complications. Network applications experience two types of variation in available network bandwidth: long term variations due to changes in actual bandwidth, and short term variations due to the probing mechanisms of the congestion control algorithm. Short-term variation is typically dealt with by buffering. Unfortunately, buffering, especially FIFO buffering with drop-tail behavior, the de-facto standard for kernel buffers and network router buffers, can result in long delay and significant delay variation, both of which are detrimental to vat's audio quality. Vat , therefore, needs to act like an ALF application, managing its own buffer space with drop-from-head behavior when the queue is full.
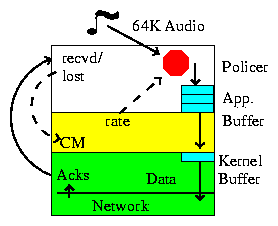
The resulting architecture is detailed in figure 2. The input audio stream is first sent to a policer, which provides long-term adaptation via preemptive packet dropping. The policer outputs into the application level buffer, which can be configured in various sizes and drop policies. This buffer feeds into the kernel buffer on-demand as packets are available for transmission.
The tests were performed on the Utah Network Testbed [23] using 600MHz Intel Pentium III processors, 128MB PC100 ECC SDRAM, and Intel EtherExpress Pro/100B Ethernet cards, connected via 100Mbps Ethernet through an Intel Express 510T switch, with Dummynet channel simulation. CM tests were run on Linux 2.2.9, with Linux and FreeBSD clients.
To ensure the proper behavior of a flow, the congestion control algorithm must behave in a ``TCP-compatible'' [9]manner. The CM implements a TCP-style window-based AIMD algorithm with slow start. It shares bandwidth between eligible flows in a round-robin manner with equal weights on the flows.

Figure 3 shows the throughput achieved by the Linux TCP implementation (TCP/Linux) and TCP with congestion control performed by the CM (TCP/CM). The linux kernel against which we compare has two algorithmic differences from the Congestion Manager: It starts its initial window at 2 packets, and it assumes that each ACK is for a full MTU. The Congestion Manager instead performs byte-counting for its AIMD algorithm. The first issue is Linux-specific, and the last is a feature of the CM.
There are two components to the overhead imposed by the congestion manager: The cost of performing accounting as data is exchanged on a connection, and a one-time connection setup cost for creating CM data structures. A microbenchmark of the connection establishment time of a TCP/CM vs. TCP/Linux indicates that there is no appreciable difference in connection setup times.

We used long (megabytes to gigabytes) connections with the ttcp utility to determine the long-term costs imposed by the congestion manager. The impact of the CM on extremely long term throughput was negligible: in a 1 gigabyte transfer, the congestion manager achieved identical performance (91.6 Mbps) as native Linux. On shorter runs, the throughput of the CM diverged slightly from that of Linux, but only by 0.5%. The throughput rates are shown in figure 4. The difference is due to the CM using an initial window of 1 MTU and Linux using 2 MTU, not CPU overhead.
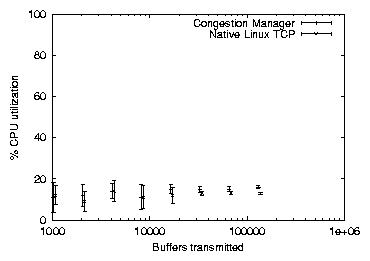
Because both implementations are able to saturate the network connection, we looked at the CPU utilization during these transmissions to determine the steady-state overhead imposed by the Congestion Manager. In figure 5 we see that the CPU difference between TCP/Linux and TCP/CM converges to slightly less than 1%.
The overhead incurred by our adaptation API occurs primarily because the applications must process their ACKs in user-space instead of in the kernel. Therefore, these programs incur extra data copies and user/kernel boundary crossings. To quantify this overhead, our test programs sent packets of specified sizes on a UDP socket, and waited for acknowledgement packets from the server. We compare these programs to a webserver-like TCP client which sendt data to the server, and performed a select() on its socket to determine if the server has sent any data back. To facilitate comparison, we disabled delayed ACKs for the one TCP test to ensure that our packet counts were identical.
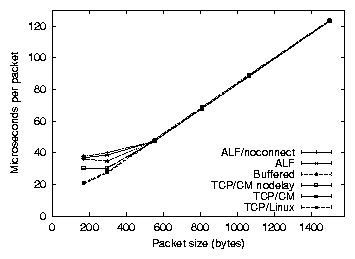
Figure 6 shows the wall-clock time required to send and process the acknowledgement for a packet, based on transmitting 200,000 packets. For comparison, we include TCP statistics as well, where the TCP programs set the maximum segment size to achieve identical network performance. The ``nodelay'' variant is TCP without delayed acks. The tests were run on a 100Mbps network on which no losses occured.
| ALF/noconnect | 1 cm_notify (ioctl) |
| ALF | 1 cm_request (ioctl) |
| 1 extra socket | |
| Buffered | 1 recv, 2 gettimeofday |
| TCP/CM | -baseline- |
Table 1 breaks down the sources of overhead for using the different APIs. Using the CM with UDP requires that applications compute the round-trip-time (RTT) of their packets, requiring a system call to gettimeofday, and requires that they process their ACKs in user-space, requiring a system call to recv and the accompanying data copy into their address space. The ALF API further requires that the application obtain an additional control socket and select upon it, and that it make an explicit call to cm_request before transmitting data. Finally, if the kernel is unable to determine the flow to which to charge the transmission, as with an unconnected UDP socket, the application must explicitly call cm_notify
These test cases represent the worst-case behavior of serving a single high-bandwidth client, because no aggregation of requests to the CM may occur. The CM programs can achieve similar reductions in processing time by using delayed acks, so the real API overhead can be determined by comparing the ALF/noconnect case to the TCP/CM case. For 168 byte packets, ALF/noconnect results in a 25% reduction in throughput relative to TCP without delayed ACKs.

One benefit of integrating congestion information with the CM is immediately clear. A client that sequentially fetches files from a webserver with a new TCP connection each time loses its prior congestion information, but with concurrent connections with the CM, the server is able to use this information to start subsequent connections with more accurate congestion windows. Figure 7 shows a test we performed across the vBNS between MIT and the University of Utah, where an unmodified (non-CM) client performed 9 retrievals of the same 128k file with a 500ms delay between retrievals, resulting in a 40% improvement in the transfer time for the later requests. (Other file sizes and delays yield similar results, so long as they overlap. The benefits are comparatively greater for smaller files). The CM requires an additional RTT ( 75ms) for the first transfer, because Linux sets its initial congestion window to 2 MTUs instead of 1. This pattern of multiple connections is still quite common in webservers despite the adoption of persistent connections: Many browsers open 4 concurrent connections to a server, and many client/server combinations do not support persistent connections. Persistent connections [29]provide similar performance benefits, but suffer from their own drawbacks, which we discuss in section 6.
In this section, we demonstrate some of the network adaptive behaviors enabled by the CM.
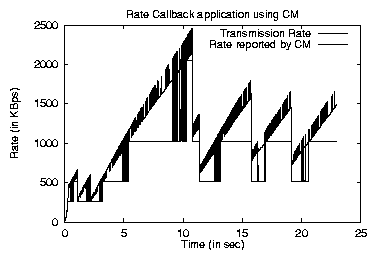
As noted earlier, applications that require tight control over data scheduling use the request/callback (ALF) API, and are notified by the CM as soon as they can transmit data. The behavior of an adaptive layering application run across the vBNS using this API is shown in figure 8. This application chooses a layer to transmit based upon the current rate, but sends packets as rapidly as possible to allow its client to buffer more data. We see that the CM is able to provide sufficient information to the application to allow it to adapt properly to the network conditions.
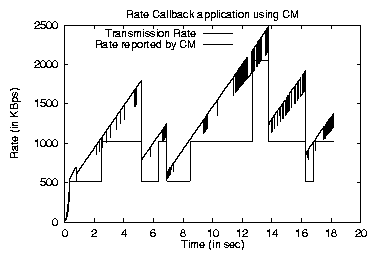
For self-clocked applications that base their transmitted data upon the bandwidth to the client (such as conventional layered audio servers), the CM rate callback mechanism provides a low-overhead mechanism for adaptation, and allows clients to specify threshholds for the notification callbacks. Figure 9 shows application adaptation using rate callbacks for a connection between MIT and the University of Utah. Here, the application decides which of the four layers it should send based on notifications from the CM about rate changes.
From figures 8 and 9, we see from the increased oscillation rate in the transmitted layer that the ALF application is more responsive to smaller changes in available bandwidth, whereas the rate callback application relies occasionally on short-term kernel buffering for smoothing. There is an overhead vs. functionality trade-off in the decision of which API to use, given the higher overhead of the ALF API, but applications face a more important decision about the behavior they desire.
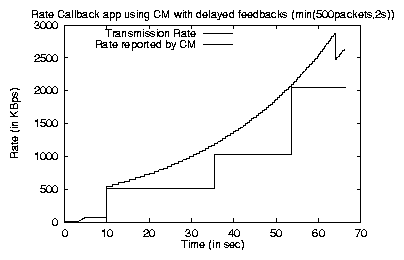
Some applications may be concerned about the overhead from receiver feedback. To mitigate this, an application may delay sending feedback; we see this in a minor and inflexible way with TCP delayed acks. In figure 10, we see that delaying feedback to the CM causes burstiness in the reported bandwidth. Here, the feedback by the receiver was delayed by min(500 acks, 2000ms). The initial slow start is delayed by 2s waiting for the application, then the update causes a large rate change. Once the pipe is sufficiently full, 500 acks come relatively rapidly, and the normal, though bursty, non-timeout behavior resumes.
We have shown several benefits of integrated flow management and the adaptation API, and have explored the design features that make the API easy to use. This section describes an optimization useful for busy servers, and discusses some drawbacks and limitations of the current CM architecture.
Optimizations. Servers with large numbers of concurrent clients are often very sensitive to the overhead caused by multiple kernel boundary crossings. To reduce this overhead, we can batch several sockets into the same cm_request call with the cm_bulk_request call, and likewise for query, notify, and update calls.
By multiplexing control information for many sockets on each CM call, the overhead from kernel crossings is mitigated at the expense of managing more complicated data structures for the CM interface. Bulk querying is already performed in libcm when multiple flows are ready during a single ioctl to determine which flows can send data, but this completes the interface.
Trust issues. Because our goal was an architecture that did not require modifications to receivers, we devised a system where applications provide feedback using the cm_update() call. The consequence of this is that there is a potential for misuse, due to bugs or malice. For example, the CM client could repeatedly misinform the CM about the absence of congestion along a path and obtain higher bandwidth. This does not increase the vulnerability of the Internet to such problems, because such abuse is already trivial. More important are situations where users on the same machine could potentially interfere with each other. To prevent this, the Congestion Manager would need to ensure that only kernel-mediated (e.g. TCP) flows belonging to different users can belong in the same macroflow. Our current implementation does not make an attempt to provide this protection. Savage [38]presents several methods by which a malicious receiver can defeat congestion control. The solutions he proposes can be easily used with the CM; we have already implemented byte-counting to prevent ACK division.
Macroflow construction When differentiated services, or any system which provides different service to flows between the same pair of hosts, start being deployed, the CM would have to reconsider the default choice of a macroflow. We expect to be able to gain some benefit by including the IP differentiated-services field in deciding the composition of a macroflow.
Finally, we observe that remote LANs are not often the bottleneck for an outside communicator. As suggested in [43,37] among others, aggregating congestion information about remote sites with a shared bottleneck and sharing this information with local peers may benefit both users and the network itself. A macroflow may thus be extended to cover multiple destination hosts behind the same shared bottleneck link. Efficiently determining such bottlenecks remains an open research problem.
Limitations The current CM architecture is designed only to handle unicast flows. The problem of congestion control for multicast flows is a much more difficult problem which we deliberately avoid. UDP applications using the CM are required to perform their own loss detection, requiring potential additional application complexity. Implementing the Congestion Manager protocol discussed in [4]would eliminate this need, but remains to be studied.
Designing adaptive network applications has been an active area of research for the past several years. In 1990, Clark and Tennenhouse [12]advocated the use of application-level framing (ALF) for designing network protocols, where protocol data units are chosen in concert with the application. Using this approach, an application can have a greater influence over deciding how loss recovery occurs than in the traditional layered approach. The ALF philosophy has been used with great benefit in the design of several multicast transport protocols including the Real-time Transport Protocol (RTP) [39], frameworks for reliable multicast [15,34], and Internet video [25,36].
Adaptation APIs in the context of mobile information access were explored in the Odyssey system [27]. Implemented as a user-level module in the NetBSD operating system, Odyssey provides API calls by which applications can manage system resources, with upcalls to applications informing them when changes occur in the resources that are available. In contrast, our CM system is implemented in-kernel since it has to manage and share resources across applications (e.g., TCP) that are already in-kernel. This necessitates a different approach to handling application callbacks. In addition, the CM approach to measuring bandwidth and other network conditions is tied to the congestion avoidance and control algorithms, as compared to the instrumentation of the user-level RPC mechanism in Odyssey. We believe that our approach to providing adaptation information for bandwidth, round-trip time, and loss rate complements Odyssey's management of disk space, CPU, and battery power.
The CM system uses application callbacks or upcalls as an abstraction, an old idea in operating systems. Clark describes upcalls in the Swift operating system, where the motivation is a lower layer of a protocol stack synchronously invoking a higher-layer function across a protection boundary [10]. The Mach system used the notion of ports, a generic communication abstraction for fast inter-process communication (IPC). POSIX specifies a standard way of passing ``soft real-time signals'' that can be used to send a notification to a user-level process, but it restricts the amount of data that can be communicated to a 32-bit quantity.
Event delivery abstractions for mobile computing have been explored in [2], where ``monitored'' events are tracked using polling and ``triggered'' events (e.g., PC card insertion) are notified using IPC. This work defines a language-level mechanism based on C++ objects for event registration, delivery, and handling. This system is implemented in Mach using ports for IPC.
Our approach is to use a select() call on a control socket to communicate information between kernel and user-level. The recent work of Banga et al. [5]to improve the performance of this type of event delivery can be used to further improve our performance.
The Microsoft Winsock implementation is largely callback-based, but here callbacks are implemented as conventional function calls since Winsock is a user-level library within the same protection boundary as the application [32]. The main reason we did not implement the CM as a user-level daemon was because TCP is already implemented in-kernel in most UNIX operating systems, and it is important to share network information across TCP flows.
Quality-of-service (QoS) interfaces have been explored in several operating systems, including Nemesis [17]. Like the exokernel approach [21]and SPIN [8], Nemesis enables applications to perform as much of the processing as possible on their own using application-specific policy, supported by a set of operating system abstractions different from those in UNIX. Whereas Nemesis treats local network-interface bandwidth as the resource to be managed, we take a more end-to-end approach of discovering the end-to-end performance to different end-hosts, enabling sharing across common network paths. Furthermore, the API exported by Nemesis is useful for applications that can make resource reservations, while the CM API provides information about network conditions. Some ``web switches'' [1]provide traffic shaping and QoS based upon application information, but do not provide integrated flow management or feedback to the applications creating the data.
Multiple concurrent streams can cause problems for TCP congestion control. First, the ensemble of flows probes more aggressively for bandwidth than a single flow. Second, upon experiencing congestion along the path, only a subset of the connections usually reduce their window. Third, these flows do not share any information between each other. While we propose a general solution to these problems, application-specific solutions have been proposed in the literature. Of particular importance are approaches that multiplex several logically distinct streams onto a single TCP connection at the application level, including Persistent-connection HTTP (P-HTTP [29], part of HTTP/1.1 [13]), the Session Control Protocol (SCP) [40], and the MUX protocol [16]. Unfortunately, these solutions suffer from two important drawbacks. First, because they are application-specific, they require each class of applications (Web, real-time streams, file transfers, etc.) to re-implement much of the same machinery. Second, they cause an undesirable coupling between logically different streams: if packets belonging to one stream are lost, another stream could stall even if none of its packets are lost because of the in-order ``linear'' delivery forced by TCP. Independent data units belonging to different streams are no longer independently processible and the parallelism of downloads is often lost.
The CM system enables applications to obtain an unprecedented degree of control over what they can do in response to different network conditions. It incorporates robust congestion control algorithms, freeing each application from having to re-implement them. It exposes a rich API that allows applications to adapt their transmissions at a fine-grained level, and allows the kernel and applications to integrate congestion information across flows.
Our evaluation of the CM implementation shows that the callback interface is effective for a variety of applications, and does not unduly burden the programmer with restrictive interfaces. From a performance standpoint, the CM itself imposes very little overhead; that which remains is mostly due to the unoptimized nature of our implementation. The architecture of programs implemented using UDP imposes some additional overhead, but the cost of using the CM after this architectural conversion is quite small.
Many systems exist to deliver content over the Internet using TCP or home-grown UDP protocols. We believe that by providing an accessible, robust framework for congestion control and adaptation, the Congestion Manager can help improve both the implementation and performance of these systems.
The Congestion Manager implementation for Linux is available from our web page, http://nms.lcs.mit.edu/projects/cm/.
1Carnegie Mellon University, Pittsburgh, PA; srini@seshan.org
2Utilities like netstat and ifconfig provide some information about devices, but not end-to-end performance information that can be used for adapting content.
3This is not strictly true in the presence of network-layer differentiated services. We address this issue later in this section and in Section 5.
4Supported by NSF grant ANI-00-82493, DARPA/AFRL grant F30602-99-1-0503 and Cisco