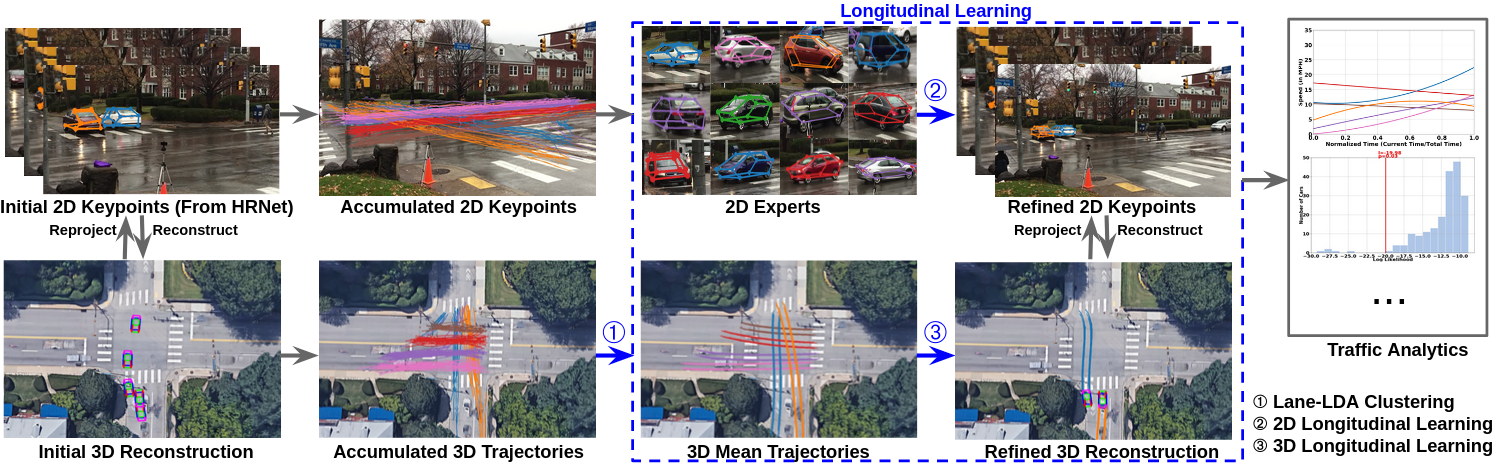
Pipeline
Our method takes off-the-shelf 2D keypoint detections as input, reconstructs 3D objects for each frame initially, and accumulates them over time. Then, for 2D self-supervision, good keypoints from initial detections are selected as "2D experts" to refine bad 2D keypoints. For 3D, the accumulated 3D trajectories are clustered and the mean trajectories are used as "3D experts" to refine 3D poses. 4D reconstruction could be applied to traffic analysis such as velocity estimation.