Discovering Object Instances from Scenes of Daily
Living
People
Description
1. Introduction
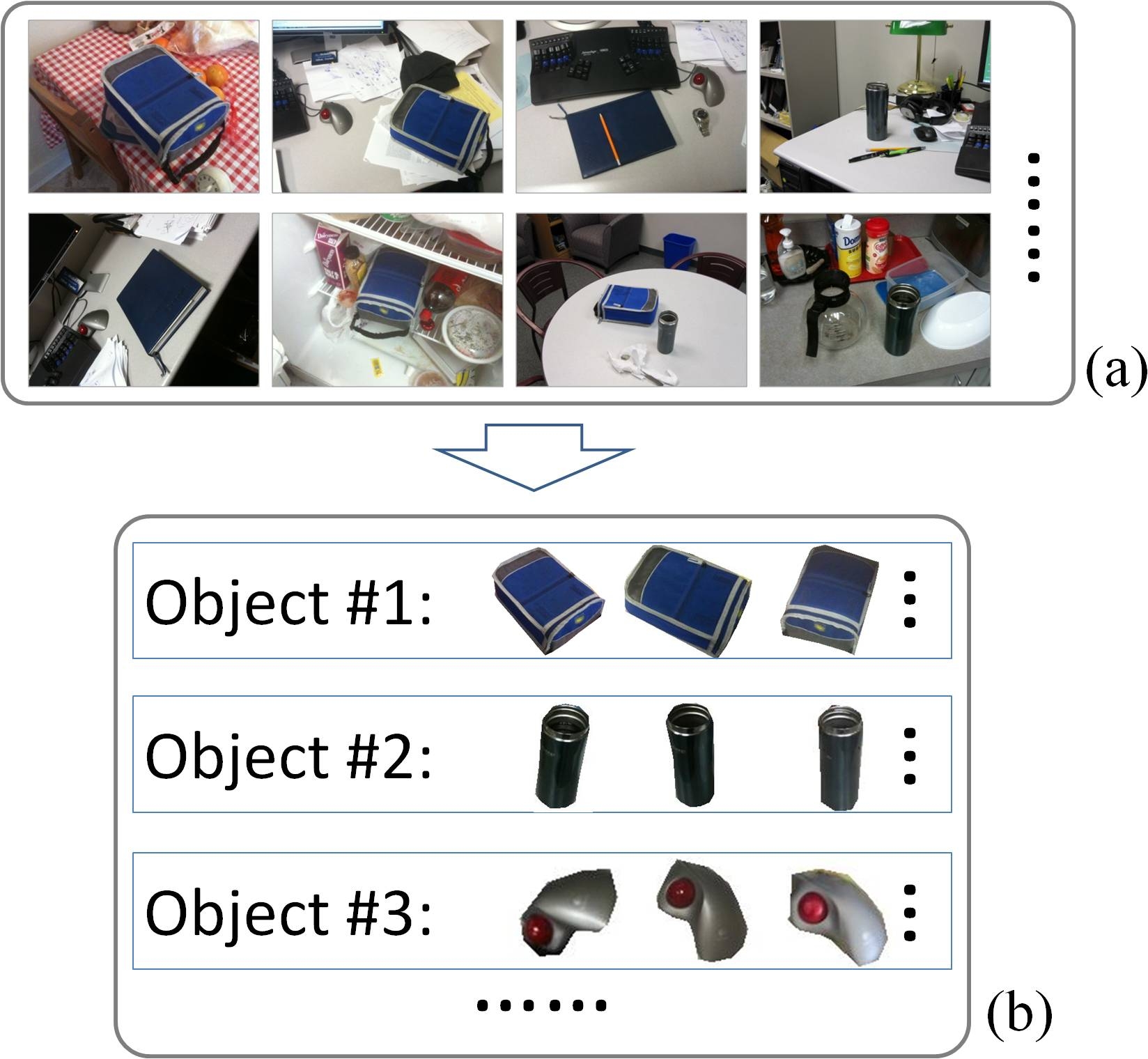
We tackle the problem of discovering object instances from Activities of Daily Living. Imagine a personal robotic assistant that accompanies a user to different scenes during her daily activities, such as kitchen, living room and office space. Every time the user operates in a scene, the robotic assistant takes a few pictures of the environment without the user explicitly showing the objects to the robot (a). After a period of data gathering, we would like the robotic assistant to automatically discover and model objects from the images it has collected (b).
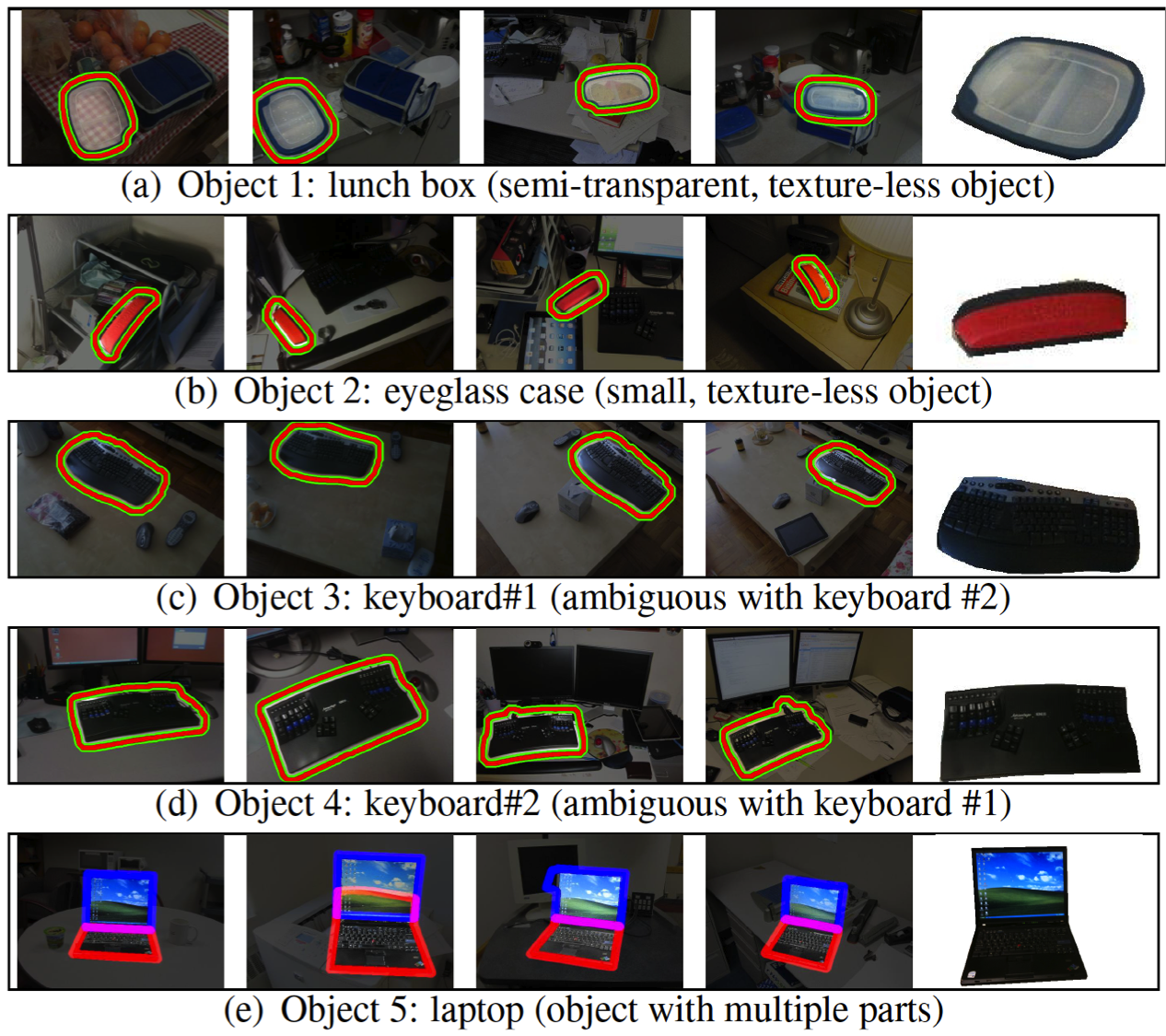
2. Examples of discovered objects
ADL dataset (heterogenity of object appearance, cluttered background,
occlusion and viewpoint change)
CMU object dataset (Cluttered environment, occlusion and viewpoint
changes)

Flickr images (Interference from irrelevant images)

We tackle the problem of discovering object instances from Activities of Daily Living. Imagine a personal robotic assistant that accompanies a user to different scenes during her daily activities, such as kitchen, living room and office space. Every time the user operates in a scene, the robotic assistant takes a few pictures of the environment without the user explicitly showing the objects to the robot (a). After a period of data gathering, we would like the robotic assistant to automatically discover and model objects from the images it has collected (b).
2. Examples of discovered objects
We evaluate our program on three different datasets, each with different characteristics.
Reference
- Discovering Object Instances from
Scenes of Daily Living
Hongwen Kang, Martial Hebert and Takeo Kanade.
13th International Conference on Computer Vision. (ICCV 2011), Barcelona, Spain, November 6-13, 2011.
[Paper (PDF)], [BibTeX], [Dataset (coming soon)]
 |
| Paper |
Funding
- NSF Grant No. EEC-0540865.