Moon Digger Robot Created For NASA Competition
Byron SpiceMonday, July 6, 2009Print this page.
Astrobotic Technology Inc. announced today that it has begun testing a robot designed to win a NASA competition for excavating simulated Moon dirt.
The NASA Regolith Excavation Challenge, set for Oct. 17-18 at the NASA Ames Research Center in Silicon Valley, will award $500,000 for the robot that can dig and dump the most simulated lunar dirt during a 30-minute workout. ("Regolith" is the technical term for the soil covering a planet, moon or asteroid.)
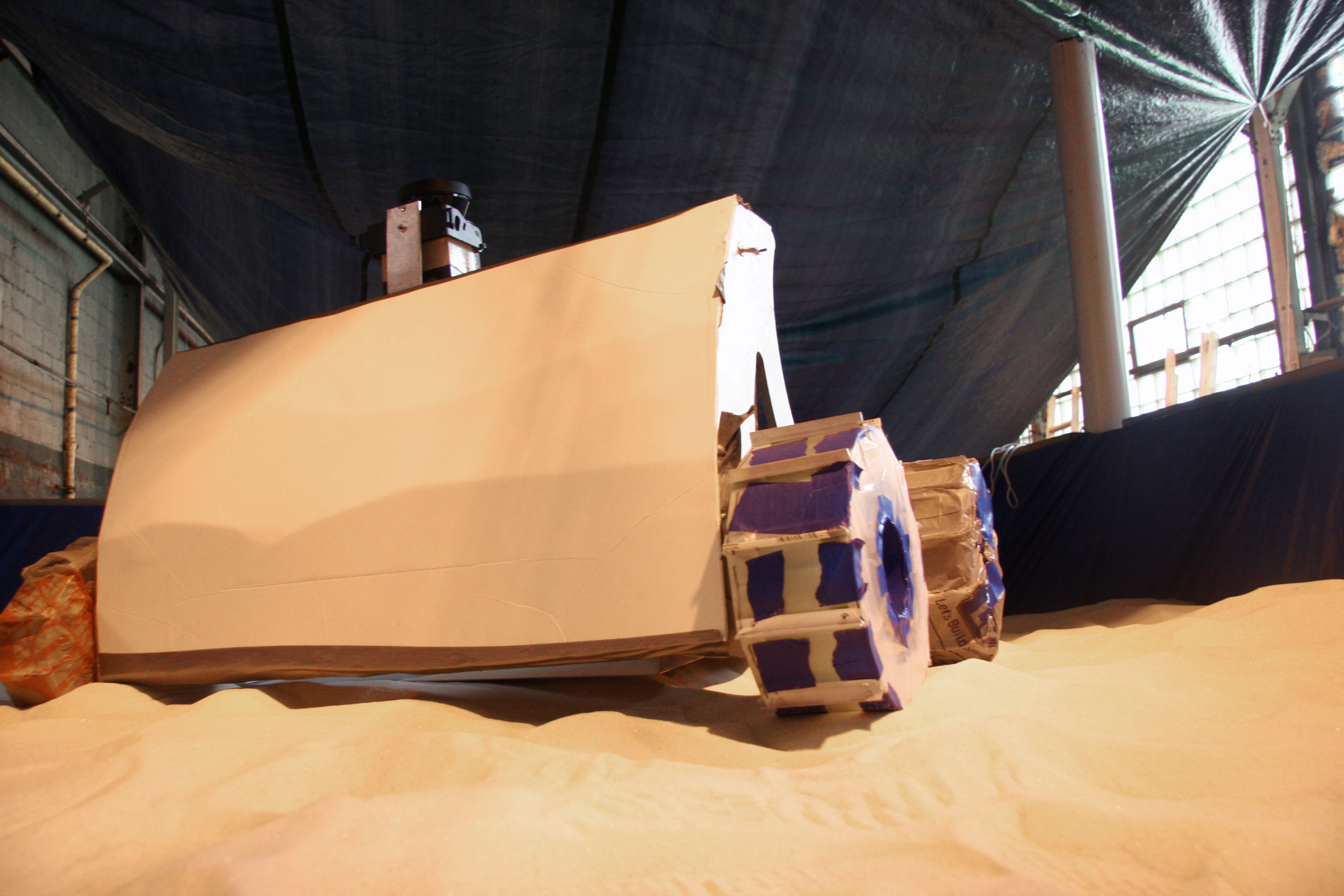
The Astrobotic robot, developed in collaboration with the Robotics Institute of Carnegie Mellon University, is about a yard on each side and two feet tall, with a laser scanner at its crown to measure distances inside the 13 ft by 13 ft competition area. The laser scanner is sponsored by SICK, Inc., of Minneapolis, a global leader in industrial sensors and safety systems. A wide scraper skims the sand-like simulated lunar dirt into its hopper. Operators drive it via computer interfaces that include a four-second time delay, similar to the lag in communicating with actual lunar robots from Earth.
In the challenge, each robot must excavate a minimum of 330 pounds of simulated Moon dirt under lunar-like conditions of limited power and bandwidth. For more details, see Astrobotic's news release.
Byron Spice | 412-268-9068 | bspice@cs.cmu.edu