|
The
Sorting Image Sensor receives an optical image, ranks pixels by
their input intensity, and assigns appropriate indices to each pixel
forming what we call "image of indices".
The values in the image of indices range for 1 to N, where N is the
number of pixels in the array. Therefore, the image of indices
never saturate regardless of the dynamic range of the optical
image. Since sorting is a global operation, the resultant
indices are optimally influenced by the content of the entire scene.
Thus the rapid adaptation to any dynamic range scenes.
In the process of sorting pixels (in analog domain) the sensor
generates a voltage waveform representative of the scene's
cumulative histogram. Cumulative histogram is one global scene
descriptor that is reported with low latency before image of indices
is even read out.
The image of indices, together with the cumulative histogram is all
that is needed to recover optical images of any dynamic range.
The project was originally sponsored by Office of Naval
Research. Currently, NSF
supports investigation of novel on-chip signal encoding techniques
that will make sorting-like adaptive imaging practical for many
robotic applications.
You can learn more about sorting sensor
chips, the Intensity-to-Time Processing Paradigm, or view some experimental
data and demos. Related publications are listed here.
|
|
Sorting
Sensor Ver.2 |
more... |
|
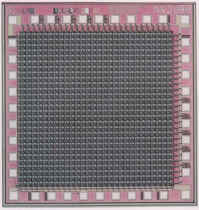
Pixel
size: 60um x 60um
Array size: 32 x 32 points
Frame rate: self-adaptive
Technology: 2um CMOS
Die size: 2.2 x 2.2mm |
|
