|
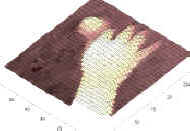
Range
Sensor uses dynamic triangulation
to deliver high precision range maps more than 100 frames per
second.
The range sensor deploys the Sensory
Attention Paradigm in each row to detect the location of the
laser
The chip development was originally sponsored by ABB.
ABB team is still involved with
application and camera development. Currently, NSF
supports algorithms development for interpretation of dynamic 3D
scenes.
You can learn more about range sensor
chip, 3D camera development, or view
experimental data and demos.
The relevant publications are listed here.
In
the News:
|
| CMU
range sensor featured in ABB's 1999 Annual Report |
|
"Intelligent
eye -- The objective of this innovative program
involving ABB and Carnegie Mellon University is to develop a new type of
machine vision sensor using CMOS integrated circuit technology. The
project will enable ABB to buila a 3-D scanner at much lower cost with no
loss of power of performance. The program is built on the understanding
that automation technology increasingly relies upon 3D, full-vision
scanning techniques for vital tasks like visual inspection, robot
guidance, process monitoring and computer modeling. This aids rapid
prototyping and robot programming."

Vladimir Brajovic, the Director for the Computational
Sensor Laboratory and the Range Sensor chip inventor and designer, holds the chip
prototype.
|
|
|
Range
Sensor Ver.3 |
more... |
|

Pixel
size: 30um x 30um
Array size: 64 x 64 points
Frame rate: up to 80 fps
Technology: 0.5um CMOS
Die size: 2.8 x 2.2mm |
|