The algorithms for determining whether the defined relations hold
between summary conditions for plans in ![]() use a point algebra
constraint table [Vilain, Kautz, 1986]. This point algebra
table is constructed for the interval endpoints corresponding to the
executions of the plans in
use a point algebra
constraint table [Vilain, Kautz, 1986]. This point algebra
table is constructed for the interval endpoints corresponding to the
executions of the plans in ![]() ; a row and column for both
; a row and column for both ![]() (start endpoint of execution
(start endpoint of execution ![]() of
of ![]() ) and
) and ![]() (finish endpoint) are added for each plan
(finish endpoint) are added for each plan
![]() . Each cell of the table gives a time point constraint of the
row to the column that can be
. Each cell of the table gives a time point constraint of the
row to the column that can be ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
![]() , or empty.
, or empty. ![]() means that the points are unconstrained. If a cell is empty, then there are no allowed temporal relations, indicating inconsistency.
Table 1 shows a point algebra table for plans
means that the points are unconstrained. If a cell is empty, then there are no allowed temporal relations, indicating inconsistency.
Table 1 shows a point algebra table for plans ![]() and
and
![]() where they are constrained such that
where they are constrained such that ![]() 's execution contains
that of
's execution contains
that of ![]() . Table 2 shows a table where just the start
of
. Table 2 shows a table where just the start
of ![]() is constrained to be earlier than the start of
is constrained to be earlier than the start of ![]() . Both are
transitive closures of these constraint relations. Table
1 can be computed from Table 2 by
constraining
. Both are
transitive closures of these constraint relations. Table
1 can be computed from Table 2 by
constraining ![]() (by putting
(by putting ![]() in the cell of row
in the cell of row
![]() and column
and column ![]() ) and then computing the transitive
closure, an
) and then computing the transitive
closure, an ![]() algorithm for
algorithm for ![]() points [Vilain, Kautz, 1986]. After
the transitive closure is computed, the constraints of any point on
any other point can be looked up in constant time.
points [Vilain, Kautz, 1986]. After
the transitive closure is computed, the constraints of any point on
any other point can be looked up in constant time.
Similarly, the constraints in ![]() for
for ![]() can be added to the
table, and the transitive closure can be computed to get all
constraints entailed from those in
can be added to the
table, and the transitive closure can be computed to get all
constraints entailed from those in ![]() . This only needs to be
done once for any
. This only needs to be
done once for any ![]() and
and ![]() to determine
to determine ![]() and
and
![]() relationships defined in the next section.
relationships defined in the next section.
We determine that a plan ![]() in
in ![]() 's subplans is temporally ordered
always-[
's subplans is temporally ordered
always-[![]() ,
,![]() ]
if and only if [
]
if and only if [![]() ,
, ![]() ] is
constrained [before, after] or equal to all other points in the point
algebra table for
] is
constrained [before, after] or equal to all other points in the point
algebra table for ![]() 's subplans. This is done by looking at each
entry in the row for [
's subplans. This is done by looking at each
entry in the row for [![]() ,
, ![]() ] and checking to see that the
constraint is [
] and checking to see that the
constraint is [![]() ,
, ![]() ],
], ![]() , or [
, or [![]() ,
, ![]() ]. If this is not
the case, then
]. If this is not
the case, then ![]() is not-always-[
is not-always-[![]() ,
,![]() ].
].
![]() is always-not-[
is always-not-[![]() ,
,![]() ] if and only if in the
row for [
] if and only if in the
row for [![]() ,
, ![]() ] there is an entry with the [
] there is an entry with the [![]() ,
, ![]() ]
constraint; otherwise, it is sometimes-[
]
constraint; otherwise, it is sometimes-[![]() ,
,![]() ].
].
An interval ![]() is covered by a set of intervals
is covered by a set of intervals
![]() if and only no interval can be found that
intersects
if and only no interval can be found that
intersects ![]() and intersects nothing in
and intersects nothing in ![]() . Our particular
covering problem describes the intervals in terms of a partial order
over endpoints, so we represent these intervals in a point algebra
table.
An algorithm for the covering problem is to check to
see if
. Our particular
covering problem describes the intervals in terms of a partial order
over endpoints, so we represent these intervals in a point algebra
table.
An algorithm for the covering problem is to check to
see if ![]() is covered by looking at all pairs of intervals to see if
they overlap.
is covered by looking at all pairs of intervals to see if
they overlap. ![]() is not covered if (1) either no intervals in
is not covered if (1) either no intervals in ![]() meet either
meet either ![]() or
or
![]() , (2) there are any intervals that have an endpoint that is
contained only by
, (2) there are any intervals that have an endpoint that is
contained only by ![]() and do not meet the opposite endpoint of another
interval in
and do not meet the opposite endpoint of another
interval in ![]() or an endpoint of
or an endpoint of ![]() , or (3) there are no intervals
overlapping
, or (3) there are no intervals
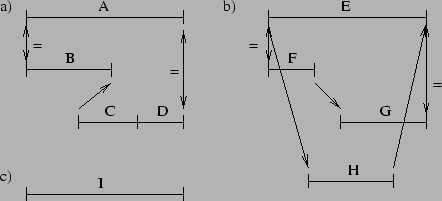
overlapping ![]() . Otherwise,
. Otherwise, ![]() is covered. Examples are given in Figure 34.
is covered. Examples are given in Figure 34.
 |

