The formalism of summary conditions culminated in Section 4 in algorithms
that determine if a set of plans (abstract or primitive)
under a partial set of ordering constraints is definitely conflict-free
(![]() ) or has unresolvable conflicts (
) or has unresolvable conflicts (![]() ).
Here we integrate these
algorithms into one
that searches for a consistent plan for one or more
agents.
The particular algorithm we describe here is shown to be sound and complete [Clement, 2002]. The
search starts out with the top-level plans of each agent. A solution is one where there are no possible conflicts among the agents' plans.
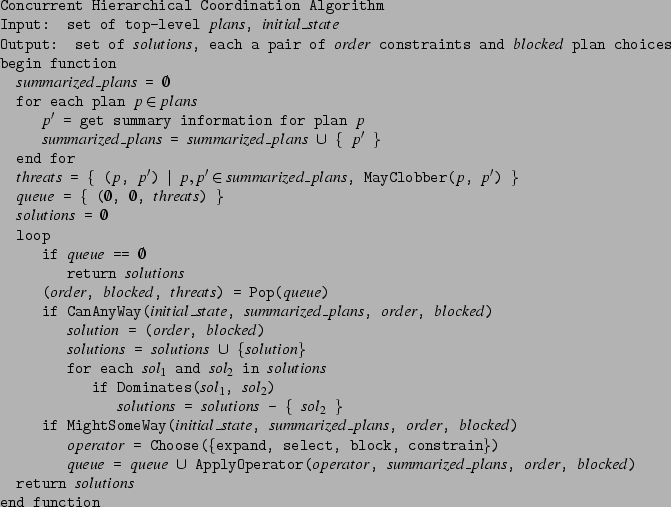
The algorithm tries to find a
solution at this top level and then expands the hierarchies deeper and
deeper until the optimal solution is found or the search space has
been exhausted. A pseudocode description of the algorithm is given in
Figure 16.
).
Here we integrate these
algorithms into one
that searches for a consistent plan for one or more
agents.
The particular algorithm we describe here is shown to be sound and complete [Clement, 2002]. The
search starts out with the top-level plans of each agent. A solution is one where there are no possible conflicts among the agents' plans.
The algorithm tries to find a
solution at this top level and then expands the hierarchies deeper and
deeper until the optimal solution is found or the search space has
been exhausted. A pseudocode description of the algorithm is given in
Figure 16.
A state of the search is a partially elaborated plan that we
represent as a set of ![]() plans (one for each agent), a set of
temporal constraints, and a set of blocked plans. The subplans of the
plans (one for each agent), a set of
temporal constraints, and a set of blocked plans. The subplans of the
![]() plans are the leaves of the partially expanded hierarchies of
the agents. The set of temporal constraints includes synchronization
constraints added during the search in addition to those dictated by
the agents' individual hierarchical plans. Blocked subplans keep
track of pruned
plans are the leaves of the partially expanded hierarchies of
the agents. The set of temporal constraints includes synchronization
constraints added during the search in addition to those dictated by
the agents' individual hierarchical plans. Blocked subplans keep
track of pruned ![]() subplans.
subplans.
Decisions can be made during search in a decentralized fashion. The agents can negotiate over ordering constraints to adopt, over choices of subplans to accomplish higher level plans, and over which decompositions to explore first. While the algorithm described here does not specify (or commit to) any negotiation technique, it does provide the mechanisms for identifying the choices over which the agents can negotiate. Although agents can make search decisions in a decentralized fashion, we describe the algorithm given here as a centralized process that requests summary information from the agents being coordinated.
In the pseudocode in Figure 16, the coordinating agent
collects summary information about the other agents' plans as it
decomposes them. The ![]() keeps track of expanded search states.
If the
keeps track of expanded search states.
If the ![]() relation holds for the search state, the Dominates function determines if the current solutions are better for
every agent than the solution represented by the current search state
and keeps it if the solution is not dominated. If
relation holds for the search state, the Dominates function determines if the current solutions are better for
every agent than the solution represented by the current search state
and keeps it if the solution is not dominated. If ![]() is
false, then the search space rooted at the current search state
can be pruned; otherwise, the coordinator applies operators to
generate new search states.
is
false, then the search space rooted at the current search state
can be pruned; otherwise, the coordinator applies operators to
generate new search states.
The operators for generating successor search states are expanding non-primitive plans,
blocking ![]() subplans, and adding temporal constraints on pairs of
plans. When an agent expands one of its plans, each of the plan's summary
conditions are replaced with only the original conditions of the
parent plan. Then the subplans' summary information and ordering constraints are
added to the search state.
A subplan of an
subplans, and adding temporal constraints on pairs of
plans. When an agent expands one of its plans, each of the plan's summary
conditions are replaced with only the original conditions of the
parent plan. Then the subplans' summary information and ordering constraints are
added to the search state.
A subplan of an ![]() plan is added (or selected) only when all
other subplans are blocked.
When ApplyOperator is called for the select and block operators, search states are generated for each selectable and blockable subplan, respectively.
Blocking an
plan is added (or selected) only when all
other subplans are blocked.
When ApplyOperator is called for the select and block operators, search states are generated for each selectable and blockable subplan, respectively.
Blocking an ![]() subplan can be effective
in resolving a constraint in which the other
subplan can be effective
in resolving a constraint in which the other ![]() subplans are not
involved. For example, if the inventory manager plans to only use transport2,
the production manager could block subplans using transport2, leaving subplans
using transport1 that do not conflict with the inventory manager's plan.
This can lead to least commitment abstract solutions that
leave the agents flexibility in selecting among the multiple
applicable remaining subplans. The agents can take another approach
by selecting a subplan (effectively blocking all of the others) to
investigate a preferred choice or one that more
likely avoids conflicts.
subplans are not
involved. For example, if the inventory manager plans to only use transport2,
the production manager could block subplans using transport2, leaving subplans
using transport1 that do not conflict with the inventory manager's plan.
This can lead to least commitment abstract solutions that
leave the agents flexibility in selecting among the multiple
applicable remaining subplans. The agents can take another approach
by selecting a subplan (effectively blocking all of the others) to
investigate a preferred choice or one that more
likely avoids conflicts.
When the operator is to add a temporal constraint, a new search state is created for each alternative temporal constraint that could be added. These successor states are enqueued so that if backtracking is needed, each alternative can be tried. Adding temporal constraints should only generate new search states when the ordering is consistent with the other global and local constraints. In our implementation, we only add constraints that will help resolve threats as determined by the must/may achieves and clobbers algorithms. When a plan is expanded or selected, the ordering constraints must be updated for the subplans that are added.
The soundness and completeness of the coordination algorithm depends on the soundness and completeness of identifying solutions and the complete exploration of the search space. Soundness and completeness is not defined with respect to achieving particular goal predicates but resolving conflicts in the plan hierarchies. A domain modeler may represent goals as abstract CHiPs that decompose into possible plans that accomplish them or as a series of actions for an agent to execute successfully.
Consider how the algorithm would find coordinated plans for the
manufacturing agents. At the beginning of the search, a coordinating agent
gathers the summary information for the top-level plans of the three
agents in ![]() . At first, there are no ordering constraints, so
. At first, there are no ordering constraints, so
![]() is empty in the first search state (shown in Figure
13a) popped from the
is empty in the first search state (shown in Figure
13a) popped from the ![]() .
. ![]() is false,
and
is false,
and ![]() is true for this state as described earlier in this
section, so the coordinator chooses an
is true for this state as described earlier in this
section, so the coordinator chooses an ![]() to apply to the
search state. It could choose constrain and order the
to apply to the
search state. It could choose constrain and order the
![]() plan before
plan before ![]() to resolve all conflicts
between those two plans.
The
to resolve all conflicts
between those two plans.
The
![]() is updated with the new constraint, and the new search state
is inserted into the
is updated with the new constraint, and the new search state
is inserted into the ![]() by according to some ranking function.
On the
next iteration of the loop, the only search state in the queue
that was just inserted is popped. The coordinator again finds that
by according to some ranking function.
On the
next iteration of the loop, the only search state in the queue
that was just inserted is popped. The coordinator again finds that
![]() is false, and
is false, and ![]() is true since
is true since ![]() may still conflict with other plans over the use of transports. It can
choose to constrain
may still conflict with other plans over the use of transports. It can
choose to constrain ![]() before
before ![]() to resolve the
remaining conflicts. This is detected on the next cycle of the search
loop where
to resolve the
remaining conflicts. This is detected on the next cycle of the search
loop where ![]() is found to be true for this search state
(shown in Figure 13b). The
is found to be true for this search state
(shown in Figure 13b). The ![]() , the two constraints
in
, the two constraints
in ![]() , and the empty set of blocked plans are added as a solution
since there is no previously found solution that Dominates it.
The Dominates function uses domain specific criteria for
determining when a solution has value as an alternative and should be
kept or is inferior compared to another and should be dropped. In
this manufacturing domain, one solution dominates another if the finish time
for at least one agent is earlier and no finish times are later for any agents. The search then
continues to find alternative or superior solutions, although the
agents may decide to terminate the search in the interest of time.
, and the empty set of blocked plans are added as a solution
since there is no previously found solution that Dominates it.
The Dominates function uses domain specific criteria for
determining when a solution has value as an alternative and should be
kept or is inferior compared to another and should be dropped. In
this manufacturing domain, one solution dominates another if the finish time
for at least one agent is earlier and no finish times are later for any agents. The search then
continues to find alternative or superior solutions, although the
agents may decide to terminate the search in the interest of time.