Agents can attempt to resolve conflicts among their plans by considering commitments to particular decompositions and ordering constraints. In order to do this, the agents must be able to identify remaining conflicts (threats) among their plans. Here we present simple algorithms for reasoning about threats between abstract plans and their required conditions.
Formally, for a set of CHiPs ![]() with ordering constraints
with ordering constraints ![]() , a
threat between an abstract plan
, a
threat between an abstract plan ![]() and a summary
condition
and a summary
condition ![]() of another plan
of another plan ![]() exists iff
exists iff ![]() may-clobber
may-clobber
![]() . We say that the threat is unresolvable if
. We say that the threat is unresolvable if ![]() must-clobber
must-clobber ![]() and
and
![]() because there are no decomposition choices or ordering constraints that could be added to resolve the threat.
because there are no decomposition choices or ordering constraints that could be added to resolve the threat.
So, a simple algorithm for identifying threats is to check to see if
each of the ![]() summary conditions of
summary conditions of ![]() plans in
plans in ![]() is
must- or may-clobbered by any other plan. Since the complexity of
checking to see if a particular condition is must- or may-clobbered is
is
must- or may-clobbered by any other plan. Since the complexity of
checking to see if a particular condition is must- or may-clobbered is
![]() , this algorithm's complexity is
, this algorithm's complexity is ![]() .
.
In many coordination tasks, if agents could determine that under
certain temporal constraints their plans can be decomposed in any way
(![]() ) or that under those constraints there is no way they can
be successfully decomposed (
) or that under those constraints there is no way they can
be successfully decomposed (![]() ), then they can make
coordination decisions at abstract levels without entering a
potentially costly search for valid plan merges at lower levels.
Here are the formal definitions of
), then they can make
coordination decisions at abstract levels without entering a
potentially costly search for valid plan merges at lower levels.
Here are the formal definitions of ![]() and
and ![]() :
:
Definition 13 states that the plans with summary
information ![]() under ordering constraints can execute in any
way if and only if all sets of plans
under ordering constraints can execute in any
way if and only if all sets of plans ![]() that have summary information
that have summary information
![]() will execute successfully in any history.
will execute successfully in any history. ![]() is true if
there is some set of plans that could possibly execute successfully.
We could also describe
is true if
there is some set of plans that could possibly execute successfully.
We could also describe ![]() ,
,![]() and
and ![]() ,
,![]() in the same fashion, but it is not obvious how their addition could further influence search. Exploring these relations may be an interesting topic for future research.
in the same fashion, but it is not obvious how their addition could further influence search. Exploring these relations may be an interesting topic for future research.
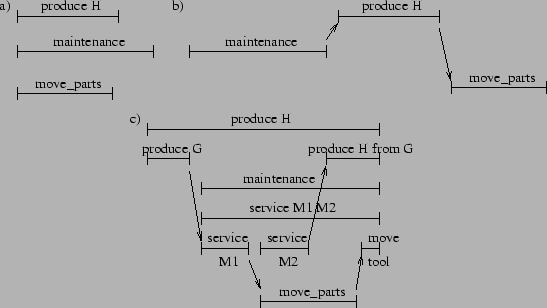
In Figure 13a, the three top-level plans of
the managers are unordered with respect to each other. The leaf plans
of the partially expanded hierarchies comprise ![]() . Arrows
represent the constraints in
. Arrows
represent the constraints in ![]() .
. ![]() ({},{
({},{![]() ,
,
![]() ,
, ![]() }) is false because there are several
conflicts over the use of machines and transports that could occur for
certain executions of the plans as described in Section
3.3 for Figure
8. However,
}) is false because there are several
conflicts over the use of machines and transports that could occur for
certain executions of the plans as described in Section
3.3 for Figure
8. However, ![]() ({}, {
({}, {![]() ,
, ![]() ,
,
![]() }) is true because the plans might in some way execute
successfully as shown in Figure 13b. With the ordering
constraints in Figure 13b,
}) is true because the plans might in some way execute
successfully as shown in Figure 13b. With the ordering
constraints in Figure 13b, ![]() ({before(1,0),
before(0,2)},{
({before(1,0),
before(0,2)},{![]() ,
, ![]() ,
, ![]() }) is true
because the plans can execute in any way consistent with these ordering constraints without conflict.
Figure 8b is an example where
}) is true
because the plans can execute in any way consistent with these ordering constraints without conflict.
Figure 8b is an example where ![]() is false because
is false because
![]() must-clobber the
must-clobber the ![]() (M2)MuF
summary precondition of
(M2)MuF
summary precondition of ![]() .
.
 |
As shown in Figure 14, the algorithm for determining
![]() for summary conditions is simple in that it only needs to check for threats.
for summary conditions is simple in that it only needs to check for threats.
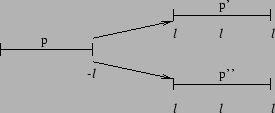
![]() is more complicated because just checking for
an unresolvable threat is not enough. As shown in Figure
15, it is not the case that plan
is more complicated because just checking for
an unresolvable threat is not enough. As shown in Figure
15, it is not the case that plan ![]() must clobber
must clobber
![]() because
because ![]() could come between and achieve the precondition
could come between and achieve the precondition
![]() of
of ![]() . Thus,
. Thus, ![]() may-clobbers
may-clobbers ![]() in
in ![]() and in
and in ![]() .
However, obviously
.
However, obviously ![]() will clobber one or the other, so
will clobber one or the other, so
![]() is false. In order to determine
is false. In order to determine ![]() is
is
![]() , an agent must exhaustively search through an exponential number of schedules
to see if not all conflicts can be resolved. Instead of
performing an exponential search to determine
, an agent must exhaustively search through an exponential number of schedules
to see if not all conflicts can be resolved. Instead of
performing an exponential search to determine ![]() , we use the simple
algorithm in Figure 14 that just checks for
must-clobber relationships. In Section 5.1 we describe
a more flexible search to find conflict-free abstract plans than just
scheduling at an abstract level.
, we use the simple
algorithm in Figure 14 that just checks for
must-clobber relationships. In Section 5.1 we describe
a more flexible search to find conflict-free abstract plans than just
scheduling at an abstract level.
Thus, while the ![]() algorithm is sound and complete, the
algorithm is sound and complete, the
![]() algorithm is complete but not sound. This also means that determining
algorithm is complete but not sound. This also means that determining ![]() is sound but not complete. We will still
make use of both of these algorithms in a sound and complete
planning/coordination algorithm in Section 5.1.
The complexity of these algorithms
is
is sound but not complete. We will still
make use of both of these algorithms in a sound and complete
planning/coordination algorithm in Section 5.1.
The complexity of these algorithms
is ![]() since the
since the ![]() procedures for determining
must/may-clobber must be run for each of
procedures for determining
must/may-clobber must be run for each of ![]() conditions (
conditions (![]() summary conditions in each of
summary conditions in each of ![]() plans represented by
plans represented by ![]() ).
).
, succeeds(e,h)
\end{array}\end{displaymath}](img253.png)