Next: Complexities Up: Algorithms for the Dual Previous: Algorithms for the Dual
We know that AC in the DE is strictly stronger than GAC in the
non-binary representation and AC in the HVE [Stergiou WalshStergiou Walsh1999]. Since the DE is a binary CSP, one obvious way to apply AC is using
a generic AC algorithm. The domain size of a dual variable
corresponding to a ![]() ary constraint is
ary constraint is ![]() in the worst case.
Therefore, if we apply an optimal AC algorithm then we can enforce
AC on one dual constraint with
in the worst case.
Therefore, if we apply an optimal AC algorithm then we can enforce
AC on one dual constraint with ![]() worst-case complexity.
In the DE of a CSP with
worst-case complexity.
In the DE of a CSP with ![]() constraints of maximum arity
constraints of maximum arity ![]() there
are at most
there
are at most ![]() binary constraints (when all pairs of dual
variables share one or more original variables). Therefore, we can
enforce AC in the DE of the CSP with
binary constraints (when all pairs of dual
variables share one or more original variables). Therefore, we can
enforce AC in the DE of the CSP with ![]() worst-case
complexity. This is significantly more expensive compared to the
worst-case
complexity. This is significantly more expensive compared to the
![]() complexity bound of GAC in the non-binary
representation and AC in the HVE. Because of the very high
complexity bound, AC processing in the DE is considered to be
impractical, except perhaps for very tight constraints.
complexity bound of GAC in the non-binary
representation and AC in the HVE. Because of the very high
complexity bound, AC processing in the DE is considered to be
impractical, except perhaps for very tight constraints.
However, we will now show that AC can be applied in the DE much
more efficiently. To be precise we can
enforce AC on the DE of a non-binary CSP with ![]() worst-case time complexity. The improvement in the asymptotic
complexity can be achieved by exploiting the structure of the DE;
namely, the fact that the constraints in the DE are piecewise
functional.
worst-case time complexity. The improvement in the asymptotic
complexity can be achieved by exploiting the structure of the DE;
namely, the fact that the constraints in the DE are piecewise
functional.
Consider a binary constraint between dual variables ![]() and
and
![]() . We can create a piecewise decomposition of the tuples in
the domain of either dual variable into groups such that all
tuples in a group are supported by the same group of tuples in the
other variable. If the non-binary constraints corresponding to the
two dual variables share
. We can create a piecewise decomposition of the tuples in
the domain of either dual variable into groups such that all
tuples in a group are supported by the same group of tuples in the
other variable. If the non-binary constraints corresponding to the
two dual variables share ![]() original variables
original variables
![]() of domain size
of domain size ![]() , then we can partition the tuples of
, then we can partition the tuples of ![]() and
and
![]() into
into ![]() groups. Each tuple in a group
groups. Each tuple in a group ![]() includes the
same sub-tuple of the form
includes the
same sub-tuple of the form
![]() , where
, where
![]() . Each tuple
. Each tuple ![]() in
in ![]() will be
supported by all tuples in a group
will be
supported by all tuples in a group ![]() of the other variable,
where each tuple in
of the other variable,
where each tuple in ![]() also includes the sub-tuple
also includes the sub-tuple
![]() .The tuples belonging to
.The tuples belonging to ![]() will be the only supports of tuple
will be the only supports of tuple
![]() since any other tuple does not contain the sub-tuple
since any other tuple does not contain the sub-tuple
![]() . In other words, a group of tuples
. In other words, a group of tuples ![]() in
variable
in
variable ![]() will only be supported by a corresponding group
will only be supported by a corresponding group
![]() in variable
in variable ![]() where the tuples in both groups have the
same values for the original variables that are common to the two
encoded non-binary constraints. Therefore, the constraints in the
DE are piecewise functional.
where the tuples in both groups have the
same values for the original variables that are common to the two
encoded non-binary constraints. Therefore, the constraints in the
DE are piecewise functional.
Van Hentenryck, Deville & Teng vhdt92 have shown that
AC can be achieved in a set of binary piecewise functional
constraints with ![]() worst-case time complexity, an
improvement of
worst-case time complexity, an
improvement of ![]() compared to the
compared to the ![]() complexity of
arbitrary binary constraints [Van Hentenryck, Deville, TengVan Hentenryck
et al.1992]. Since we showed that
the constraints in the DE are piecewise functional, the result of
Van Hentenryck et al. vhdt92 means that we can improve
on the
complexity of
arbitrary binary constraints [Van Hentenryck, Deville, TengVan Hentenryck
et al.1992]. Since we showed that
the constraints in the DE are piecewise functional, the result of
Van Hentenryck et al. vhdt92 means that we can improve
on the ![]() complexity of AC in the DE.
complexity of AC in the DE.
In Figure 4 we sketch an AC-3 like AC algorithm
specifically designed for the DE, which we call PW-AC (
PieceWise Arc Consistency). As we will show, this algorithm has a
worst-case time complexity of ![]() . The same complexity
bound can be achieved by the AC-5 algorithm of Van Hentenryck et
al. vhdt92, in its specialization to piecewise
functional constraints, with the necessary adaptations to operate
in the DE. As do most AC algorithms, PW-AC uses a stack (or queue)
to propagate deletions from the domains of variables. This stack
processes groups of piecewise decompositions, instead of variables
or constraints as is usual in AC algorithms. We use the following
notation:
. The same complexity
bound can be achieved by the AC-5 algorithm of Van Hentenryck et
al. vhdt92, in its specialization to piecewise
functional constraints, with the necessary adaptations to operate
in the DE. As do most AC algorithms, PW-AC uses a stack (or queue)
to propagate deletions from the domains of variables. This stack
processes groups of piecewise decompositions, instead of variables
or constraints as is usual in AC algorithms. We use the following
notation:
The algorithm works as follows. In an initialization phase, for
each group we count the number of tuples it contains (lines 3-6).
Then, for each variable ![]() we iterate over the variables
we iterate over the variables ![]() that are constrained with
that are constrained with ![]() . For each group
. For each group
![]() of
of ![]() , we check if
, we check if
![]() is empty or not (line 10). If it is empty, it is added to the
stack for propagation.
is empty or not (line 10). If it is empty, it is added to the
stack for propagation.
In the next phase, function ![]() is called to delete
unsupported tuples and propagate the deletions (line 12). Once the
previous phase has finished, the stack will contain a number of
groups with 0 cardinality. For each such group
is called to delete
unsupported tuples and propagate the deletions (line 12). Once the
previous phase has finished, the stack will contain a number of
groups with 0 cardinality. For each such group
![]() we
must remove all tuples belonging to group
we
must remove all tuples belonging to group
![]() since they have lost their support. This is done by successively
removing a group
since they have lost their support. This is done by successively
removing a group
![]() from the stack and calling
function
from the stack and calling
function ![]() . Since group
. Since group
![]() has lost its
support, each tuple
has lost its
support, each tuple
![]() that belongs to
that belongs to
![]() is deleted (lines 20-21). Apart from
is deleted (lines 20-21). Apart from
![]() , tuple
, tuple ![]() may also belong to other
groups that
may also belong to other
groups that ![]() is partitioned in with respect to constraints
between
is partitioned in with respect to constraints
between ![]() and other variables. Since
and other variables. Since ![]() is deleted, the
counters of these groups must be updated (i.e. reduced by one).
This is done in lines 22-23. In the implementation we use
function
is deleted, the
counters of these groups must be updated (i.e. reduced by one).
This is done in lines 22-23. In the implementation we use
function ![]() to access the relevant groups. If the counter
of such a group becomes 0 then the group is added to the stack for
propagation (lines 24-25 and 18). The process stops when either the
stack or the domain of a variable becomes empty. In the former
case, the DE is AC, while in the latter it is not.
to access the relevant groups. If the counter
of such a group becomes 0 then the group is added to the stack for
propagation (lines 24-25 and 18). The process stops when either the
stack or the domain of a variable becomes empty. In the former
case, the DE is AC, while in the latter it is not.
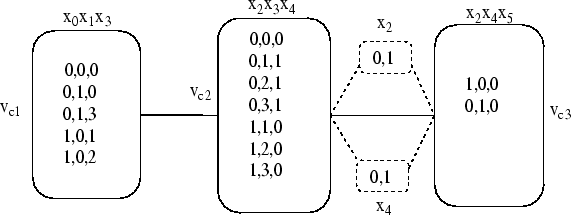
The following example illustrates the advantage of algorithm PW-AC over both a generic AC algorithm employed in the DE, and AC in the HVE (or GAC in the non-binary representation).
Now consider the HVE of the problem. Applying AC on the HVE will
have no effect because values 0 and 1 of ![]() and
and ![]() are both
supported in
are both
supported in ![]() and
and ![]() . Therefore there is no
propagation through these variables, and as a result the two
tuples of
. Therefore there is no
propagation through these variables, and as a result the two
tuples of ![]() will not be deleted. Similarly, there will
be no propagation if we apply GAC in the non-binary representation
of the problem.
will not be deleted. Similarly, there will
be no propagation if we apply GAC in the non-binary representation
of the problem.
Note that the theoretical results regarding the DE presented in
the rest of the paper hold if the AC-5 algorithm of Van Hentenryck
et al. vhdt92 was adapted and used the DE instead of
PW-AC. The two algorithms have some similarities (e.g. they both
use a function to access the group of a decomposition that a
certain tuple belongs to, though implemented differently), but
their basic operation is different. The algorithm of Van
Hentenryck et al. vhdt92, being an instantiation of
AC-5, handles a queue of triples ![]() to implement
constraint propagation, where
to implement
constraint propagation, where ![]() and
and ![]() are two variables
involved in a constraint and
are two variables
involved in a constraint and ![]() is a value that has been removed
from
is a value that has been removed
from ![]() . PW-AC utilizes a queue of piecewise decompositions.
Also the data structures used by the algorithms are different.
PW-AC checks and updates counters to perform the propagation
which, as we explain below, requires space exponential in the
number of common variables in the non-binary constraints. The
algorithm of Van Hentenryck et al. vhdt92 utilizes a
more complicated data structure which requires space exponential
in the arity of the non-binary constraints. It has to be noted,
however, that PW-AC is specifically designed for the DE. That is,
its operation, data structures, and the way it checks for
consistency are based on the fact that the domains of the dual
variables consist of the tuples of the original constraints
extensionally stored. On the other hand, the algorithm of Van
Hentenryck et al. vhdt92 is generic, in the sense that
it can be adapted to operate on any piecewise functional
constraint.
. PW-AC utilizes a queue of piecewise decompositions.
Also the data structures used by the algorithms are different.
PW-AC checks and updates counters to perform the propagation
which, as we explain below, requires space exponential in the
number of common variables in the non-binary constraints. The
algorithm of Van Hentenryck et al. vhdt92 utilizes a
more complicated data structure which requires space exponential
in the arity of the non-binary constraints. It has to be noted,
however, that PW-AC is specifically designed for the DE. That is,
its operation, data structures, and the way it checks for
consistency are based on the fact that the domains of the dual
variables consist of the tuples of the original constraints
extensionally stored. On the other hand, the algorithm of Van
Hentenryck et al. vhdt92 is generic, in the sense that
it can be adapted to operate on any piecewise functional
constraint.