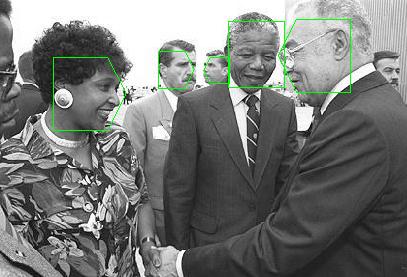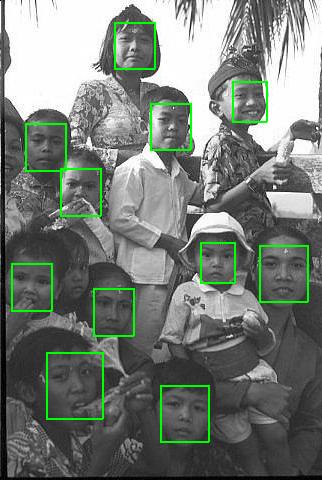
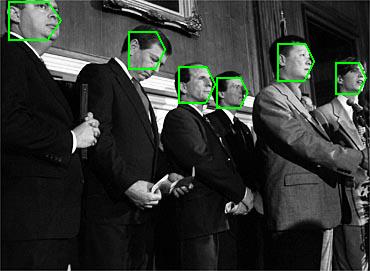
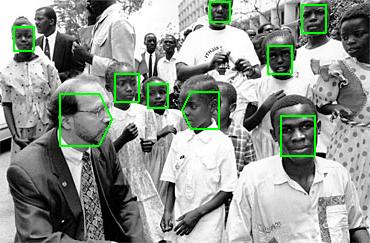
We wish to detect upright human faces that vary in orientation
from profile to frontal view.
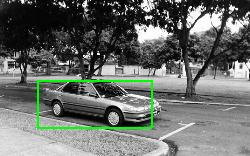
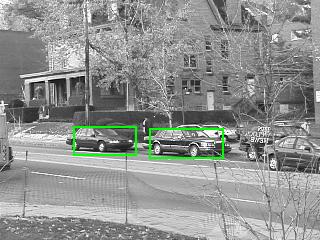
For automobiles we are limiting ourselves to 2 door and
4 door passenger cars and a restricted range of view points.


 >
> >
>

For both problems we place no restrictions on background
scenery, lighting, or other natural environmental conditions.
Variation of the object itself:


Variation due to lighting:



Variation due to pose (the geometric relationship of the camera to the object):




1. Statistical modeling of appearance
The main component of our detector is a statistical representation of visual appearance. We use a statistical model to represent the object's appearance over a small range of pose variation. The purpose of this model is to capture variation in the appearance of the object that cannot be modelled explicitly. This includes variation in the object itself, variation due to lighting, and small variations in pose. We also use a statistical model to describe the rest of the visual world; that is, everything the object must be discriminated from.
2. Multiple view-specific detectors - Since
each detector is designed for a specific orientation of the object, we
use multiple detectors that span a range of the object's orientation.
We then combine the results of these individual detectors:
3. Exhaustive search - The desired object
may exist at any size and position within the image. To detect the
object at any position, we must exhaustively apply the detectors over a
range of positions. To detect the object at any size we must also
apply the detectors to scaled versions of the image.
Results
Frontal Face detection
Test set: 130 images, 507 frontal faces. Images
selected by Sung , Poggio and Rowley, Baluja, Kanade
| Notes | Detection rate | False detections | |
| Our detector | Excluded 5 images of
hand drawn faces |
90.5% | 2 |
| Rowley, Baluja, Kanade | 86.0% | 31 | |
| Colmenarez, Huang | 89.9% | 6,1333 |