15-463 Computational
Photography
Final Project: Feature Matching &
Automatically Stitching 360 Panoramas
Hassan Rom
mrom at andrew.cmu.edu
Introduction
The goal of our final project is to extend project 4 to automatically construct
360 panoramas from images in a directory supplied by the user. The program we
have developed can be categorized into two parts. The first part of the
program constructs correspondence between all pairs of input images and the
second part of the program, uses the correspondence from the first part to
construct a panorama.
Building the Graph
The user will provide the program the path to the directory where the images
are located. For each image in the directory, the program will build a set of
feature descriptors. Using these feature descriptors, the program tries to
identify correspondence between all pairs of input images. The program
represents image correspondence with a graph where a node in graph
represents an image and an edge from node a to node b represents the
correspondence from image a to image b.

The figure above is an example of a correspondence graph. It's a bit hard to see, but
there are 5 groups of images. The program succeeded in identifying 2 panoramas
out of 3.
Constructing the Panorama
To construct the panorama, we do a breadth first traversal of the graph
starting from a node specified by the user. As we traverse the graph, we
incrementally build the panorama by stitching the panorama we have so far with
the image corresponding to the current node we are at.
Results
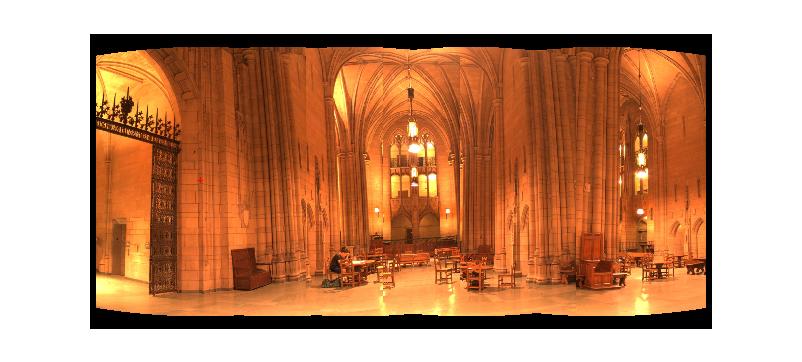
The panorama above is constructed from the same set of pictures as in project
4. If you look closely, there are noticable seams/discontinuities between two
pair of overlapping images. One possible reason why this is so is the
estimated focal length is not accurate which would make it harder for us to
align the two images. Another possible reason is the two images we want to
stitch might have different exposure levels. Note that we purposely did not
apply any feathering/blending algorithms when stitching two images so that
we can easily see glitches in our program.

Another example(images taken from Richard Szeliski's Computer Vision class)
which didn't work as well as the previous panorama.

The program assumes that the focal length is the same for all the images, but
in some of the images below, you can see that's not the case.

Conclusion
It turned out the project was harder than we initially thought. There were
several problems that is worth mentioning.
Firstly, it is very hard to get an accurate estimate of the focal length.
An accurate estimate of the focal length is important to minimize error when
estimating the rotation matrix of the Homography.
Secondly, the whole program is complex and it is clear that the program
consists of several independent modules. A module that handles stitching two
images is one example, and a module that generates feature descriptors is
another. Each of these modules has many different implementation with its own
set of pros and cons. Having a clear understanding of the problem and
available solutions would definitely help in getting the correct design of the
program the first time.
Lastly, we made the mistake of going straight to spherical panoramas first as opposed to
cylindrical panoramas. It seems to us that cylindrical panoramas are much
easier than spherical panoramas since aligning two images in the cylindrical
image space is translational but in spherical image space, moving an image along the
latitude would also require warping of the image.
What worked? What didn't?
For the most part, our program is able to correctly identify correspondence
between images in a directory although it would be nice if we could compare
our current implementation with different kinds of feature descriptors, SIFT for
example.
As of now, unfortunately, our program is not able to construct spherical
panoramas. Also, we have yet to implement any feathering/blending algorithms
when stitching the two images.
Future Work
Despite all the hardships, we liked this project. While working on this
project, there were some unanswered questions that we would like to look into
more.
How can we use the graph representation to choose which image should be at the
center of the panorama?
Can the graph help us to choose an optimal path such that it would minimize
the total error?
Can we use the graph to construct a virtual world similar to Quicktime VR on
the fly?
In general, what are the useful properties of the graph?